Maschinelles Lernen: Themenfelder und Überblick
Allgemeines
- Teilgebiet der KI: Programme verbessern sich durch Erfahrung
- Definition (Tom M. Mitchell, 1997):
- A computer program learns from experience \(E\) w. r. t. tasks \(T\) and performance \(P\)
- if its performance at \(T\), measured by \(P\), improves with \(E\)
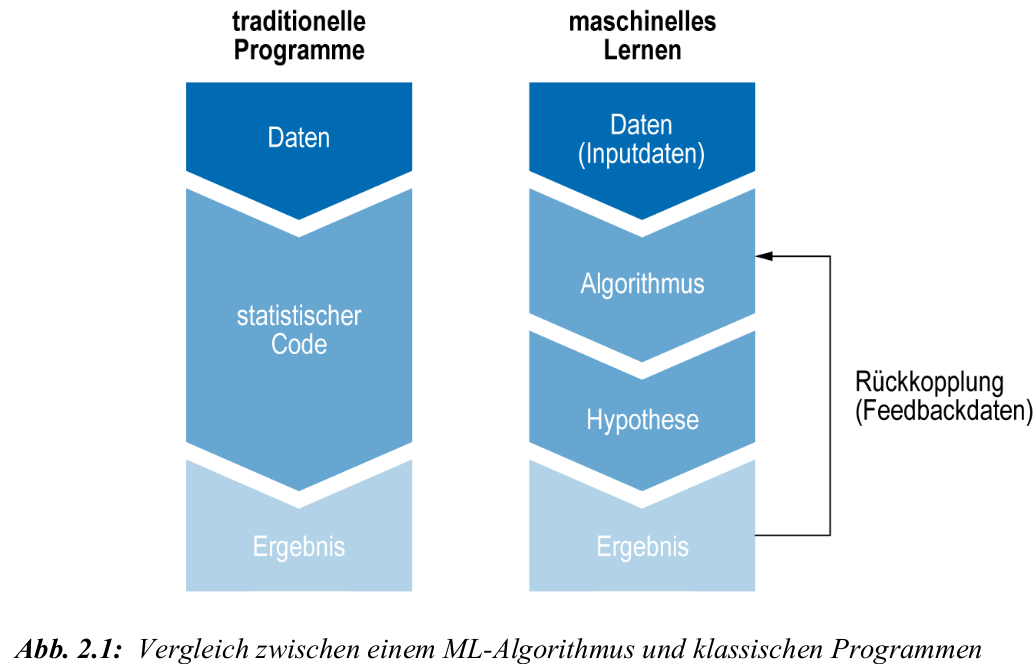
- ML-Algorithmen erkennen Muster in Daten und lernen daraus
- Unterschied zu klassischen Programmen: Lernen durch Rückkopplung
- hier könnte Abbildung 2.1 stehen
Ablauf eines ML-Verfahrens
- Trainingsdaten \(\ra\) Hypothese \(\ra\) Ergebnis \(\ra\) Feedback
- Ziel: Optimierung der Hypothese durch Rückkopplung
- zwei Modi:
- Offline-Lernen: Training einmalig vor Anwendung
- Online-Lernen: kontinuierliche Anpassung im Betrieb
ML: Teilbereiche und Abgrenzung
Überblick
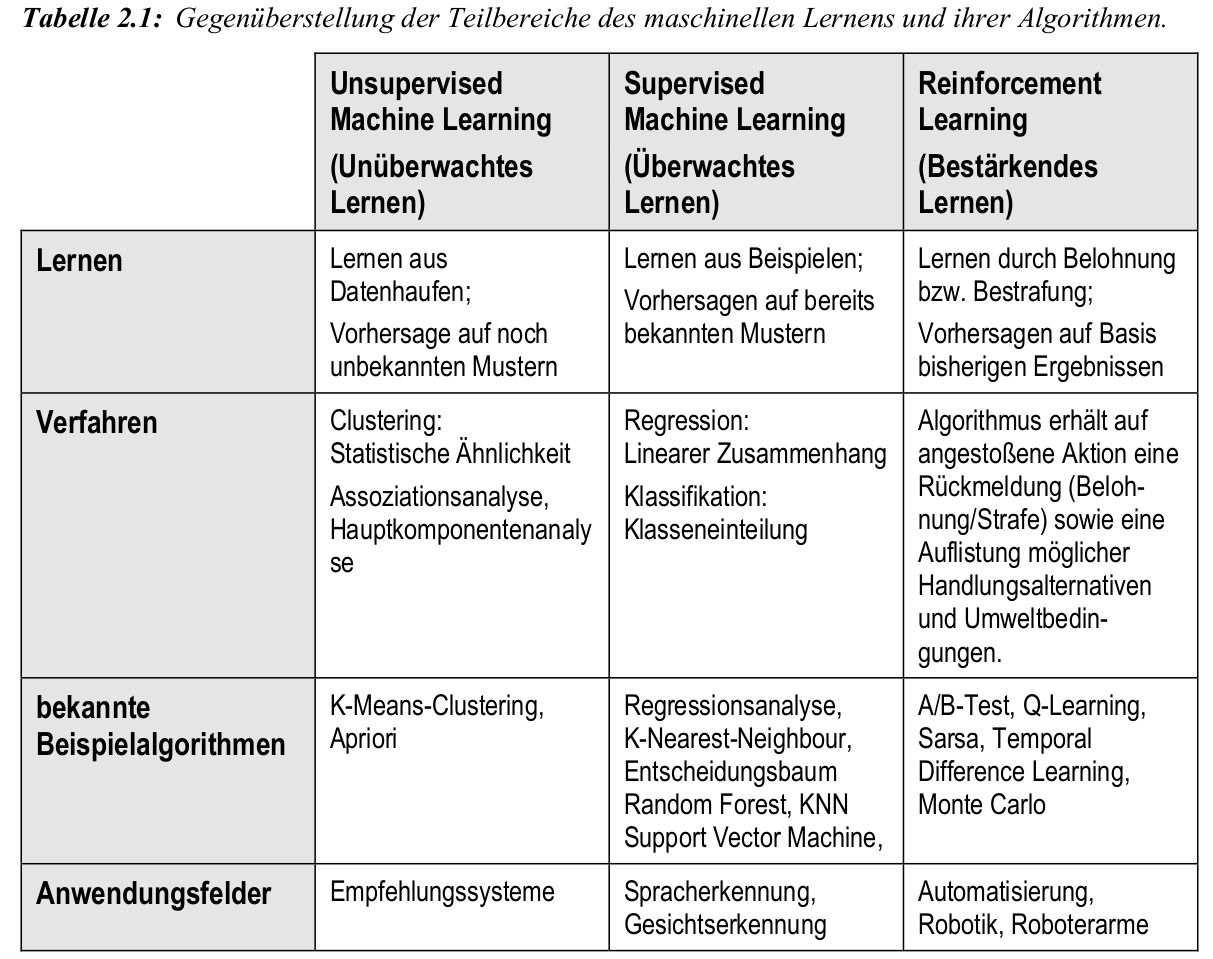
- Unsupervised Learning (UL): lernt aus nicht gelabelten Daten (z. B. Clustering)
- Supervised Learning (SL): lernt aus gelabelten Beispielen (z. B. Klassifikation, Regression)
- Reinforcement Learning (RL): lernt durch Belohnung/Strafe in Interaktion mit Umwelt
Supervised Learning (SL)
- gelabelte Trainingsdaten: \((x_i, y_i)\) bekannt für alle \(i\)
- Ziel: Modell zur Vorhersage von \(y\) aus \(x\)
- zwei Problemtypen: Regression (z. B. Temperatur) und Klassifikation (z. B. medizinische Diagnose)
- typische Anwendungen: Spracherkennung, Chatbots, Predictive Maintenance
- typische Algorithmen: KNN, Random Forest, SVM, Neuronale Netze
Unsupervised Learning (UL)
- keine Zielvariable \(y\) – nur Merkmalsdaten \(x\)
- Ziel: versteckte Muster oder Strukturen erkennen
- wichtigste Technik: Clustering
- Beispiele: Marktsegmente, soziale Gruppen, Themen in Texten
- typische Algorithmen: K-Means, hierarchisches Clustering, spektrales Clustering
- Anwendung u. a. bei Empfehlungssystemen (z. B. Netflix)
Reinforcement Learning (RL)
- Agent lernt durch Interaktion mit einer Umgebung
- Aktionen \(a_t\) verändern Zustand \(s_t\) und führen zu Reward \(r_t\)
- Lernen basiert auf Trial & Error ohne vollständiges Umweltwissen
- Ziel: Policy, die langfristig Belohnung maximiert
- zentrale Herausforderung: Exploration vs. Exploitation
- typische Algorithmen: Q-Learning, SARSA, Monte Carlo, Temporal Difference
Teilbereiche des ML (Überblick)
ACHTUNG: Auch diese Tabelle ist regelmäßig klausurrelevant
Robotik
Einführung
- Robotik ist Teilbereich der KI, eng verbunden mit Maschinenbau und Informatik
- Fokus: Interaktion mit physischer Welt über Sensoren und Aktoren
- zentrale Rolle in Industrie 4.0, z. B. durch fahrerlose Transportsysteme
- typische Einsatzbereiche: automatisierte Produktion, Materialfluss, Mensch-Maschine-Kooperation
- zwei zentrale Robotertypen:
- Cobots – kollaborative Roboter
- FTS/AMR – autonome Transportfahrzeuge
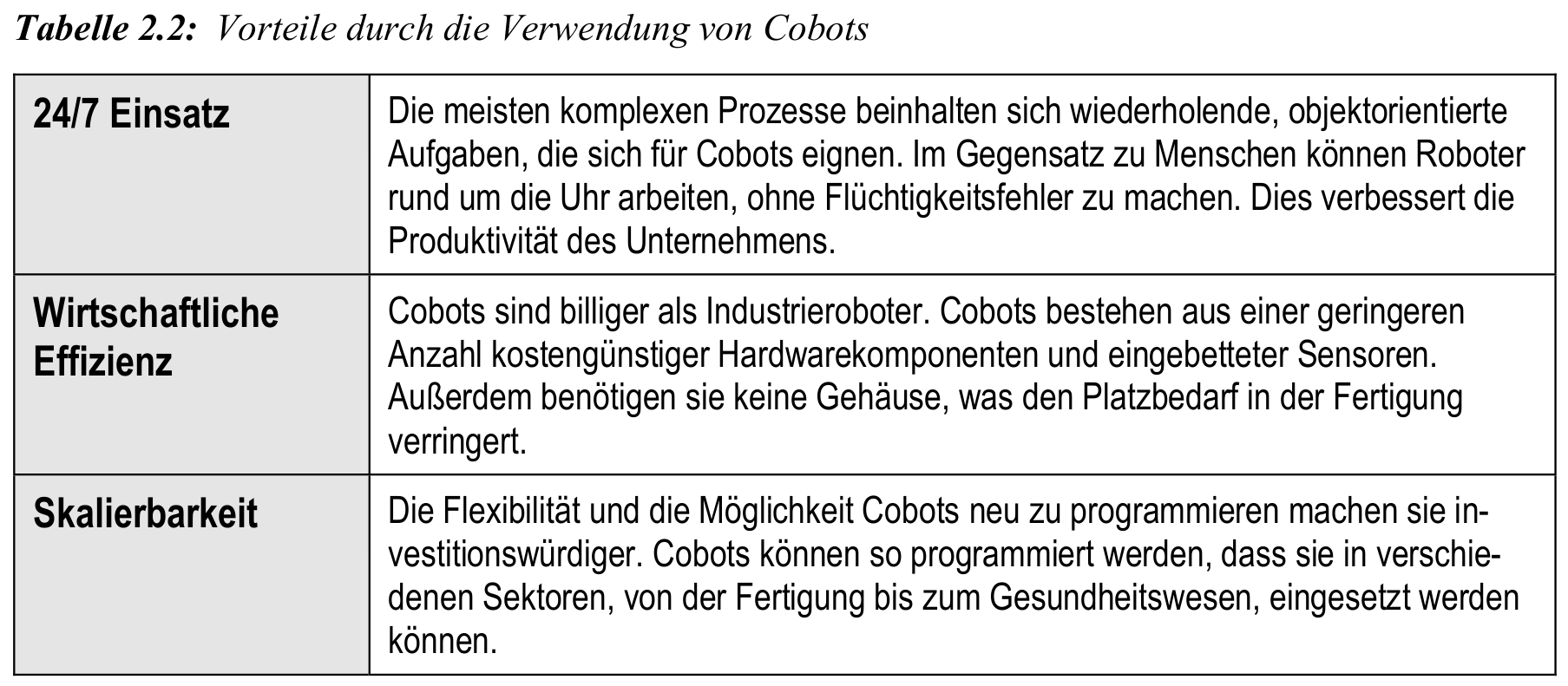
Cobots: kollaborative Roboter
- Cobots arbeiten direkt mit Menschen ohne Schutzvorrichtung zusammen
- zentrale Idee: Kombination menschlicher Flexibilität mit robotischer Ausdauer
- vier Haupttypen nach ISO 10218:
- Sicherheitsüberwachter Stopp
- Geschwindigkeit/Abstandsüberwachung
- Leistungs- und Kraftbegrenzung
- Handführung
ACHTUNG: Klausur (14.09.2024): bisher einmalig folgende Tabelle abgefragt:
Robotik: Anwendungen kollaborativer Roboter
- Pick & Place: Objekte greifen, bewegen, neu positionieren
- Maschinenversorgung: z. B. CNC-, Spritzgieß- oder Stanzmaschinen
- Prozessunterstützung: Kleben, Bohren, Schweißen mit Endeffektor
- Fertigstellung: Polieren, Schleifen, Entgraten mit Kraftsensor
- Qualitätskontrolle: Bilderfassung & Sortierung mit maschinellem Sehen
- Verpackung: Entlastung bei monotonen Routineaufgaben
- Gesundheitswesen:
- Unterstützung bei Hygiene, Vitaldaten, Blutabnahme
- automatisierte Reha-Maßnahmen
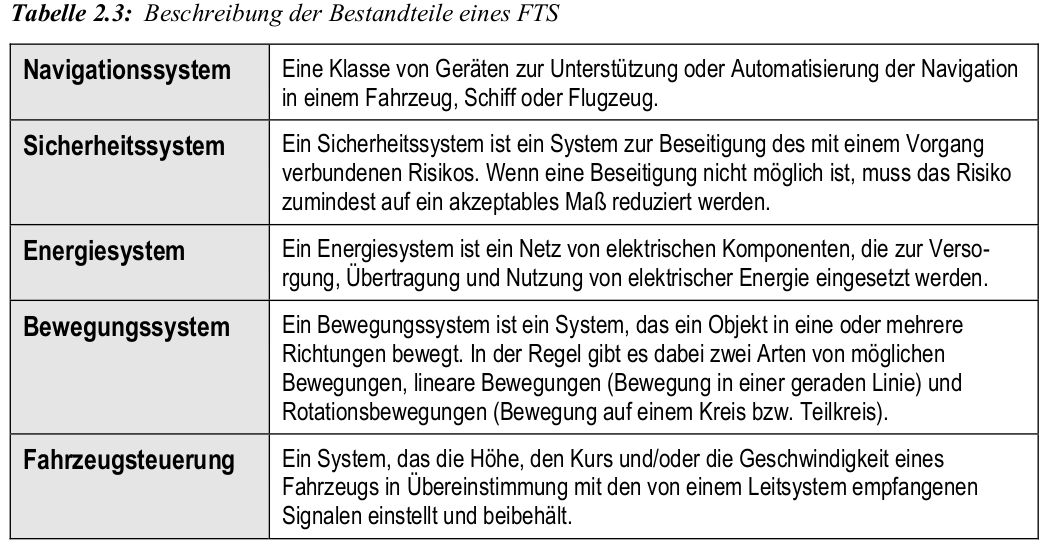
Autonome Transportsysteme
Einführung: Fahrerlose Transportsysteme (FTS)
- selbstgesteuerte Fahrzeuge für Lager, Produktion, Logistik
- zwei Typen:
- AGV (automated guided vehicle): folgen Leitlinien (z. B. Magnetband)
- AMR (autonomous mobile robot): navigieren frei per Sensorik
- Vorteile: effizienter Materialfluss, geringe Personalkosten, hohe Präzision

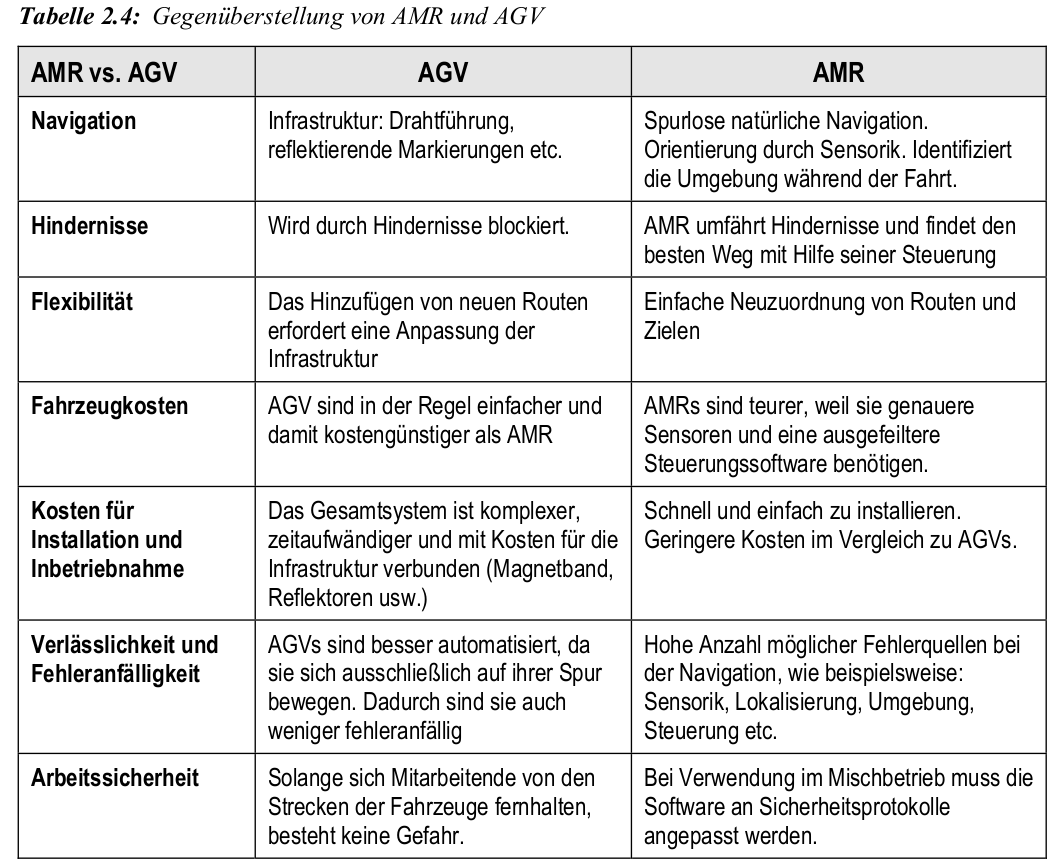
ACHTUNG: Klausur (14.09.2024): bisher einmalig folgende Tabelle abgefragt:
Unterschiede AGV vs. AMR
- Navigation: AGV folgt externer Infrastruktur, AMR navigiert eigenständig
- Hindernisse: AGV wird blockiert, AMR umfährt
- Flexibilität: AMR kann spontan neue Ziele anfahren
- Kosten: AMR teurer, aber geringere Installationskosten
- Sicherheit: AGV sicher bei klarer Spur, AMR benötigt Sicherheitsprotokolle
Evolutionäre Algorithmen: genetische Verfahren
Genetische Algorithmen (GA): Grundprinzip
- heuristische Optimierung basierend auf Darwin’scher Selektion
- Lösung = Chromosom; Variable = Gen
- Ziel: mit Selektion, Crossover und Mutation bessere Lösungen erzeugen
- Fitnessfunktion bewertet Qualität jeder Lösung
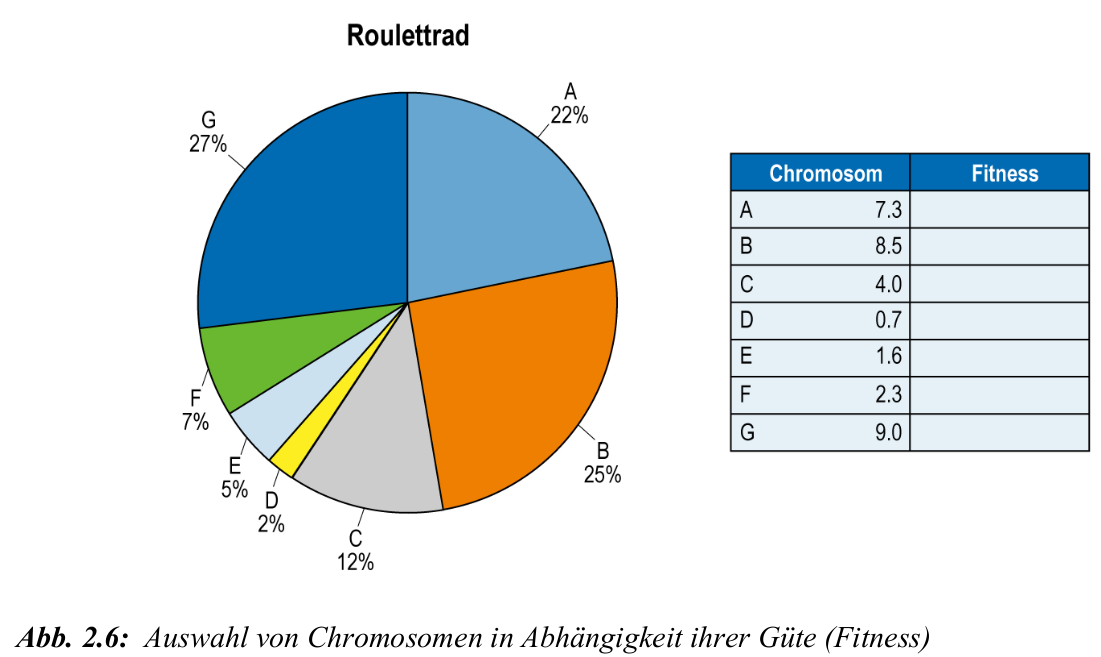
Operatoren: Selektion, Crossover, Mutation
- Selektion: fittere Individuen haben höhere Auswahlwahrscheinlichkeit
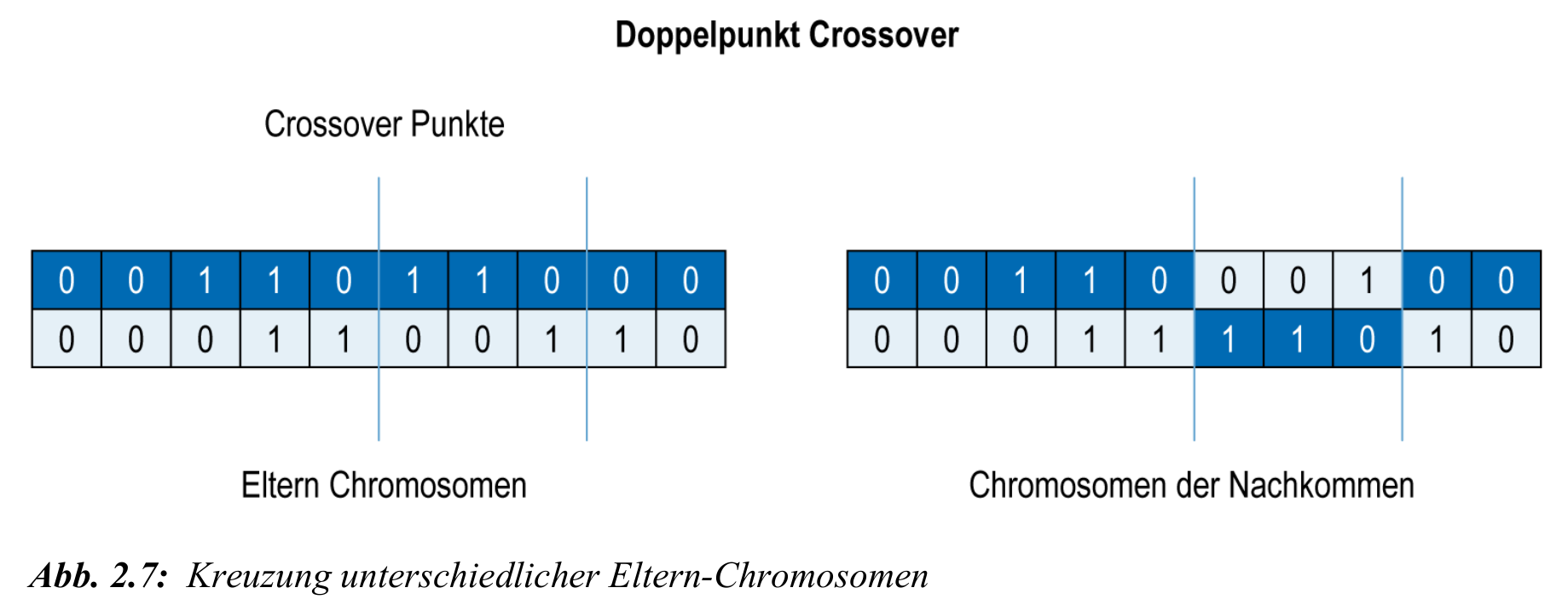
- Crossover: Austausch von Genen zur Kombination guter Eigenschaften
- Mutation: zufällige Genänderung zur Vermeidung lokaler Minima
- Elitismus: beste Lösungen direkt in nächste Generation übernommen
ACHTUNG: Klausurrelevant mehrmals – Definitionen
Beachte die jeweiligen einzeln hervorgehoen Sätze !
- Kreuzung (Crossover):
Die natürliche Selektion ermöglicht die Auswahl von Individuen als Eltern für den Crossover-Schritt. Dieser Schritt ermöglicht den Austausch von Genen zwischen Individuen, um neue Lösungen zu erzeugen. In der Literatur gibt es verschiedene Crossover-Methoden. Bei der einfachsten Methode werden die Chromosomen an zwei oder drei Stellen geteilt. Anschließend werden dann die Gene zwischen zwei Chromosomen ausgetauscht. - Mutation:
Mit Hilfe der Mutation werden zufällige Veränderungen in den Genen erzeugt. Es gibt einen Parameter namens Mutationswahrscheinlichkeit \((P_m)\), der für jedes Gen in einem Kinderchromosom verwendet wird, das in der Crossover-Phase erzeugt wird. Dieser Parameter ist eine Zahl im Intervall von \([0,1]\). Für jedes Gen im neuen Kindchromosom wird eine Zufallszahl im gleichen Intervall erzeugt. Wenn diese Zufallszahl kleiner als \(P_m\) ist, wird dem Gen eine Zufallszahl mit der unteren und oberen Grenze zugewiesen.
Schwarmintelligenz
Grundprinzip
- kollektives Verhalten einfacher Agenten (z. B. Insekten, Vögel)
- Systemverhalten entsteht durch lokale Interaktion & Selbstorganisation
- kein zentrales Steuerungselement, aber globale Zielerreichung möglich
- robust gegenüber Ausfällen, sehr flexibel einsetzbar
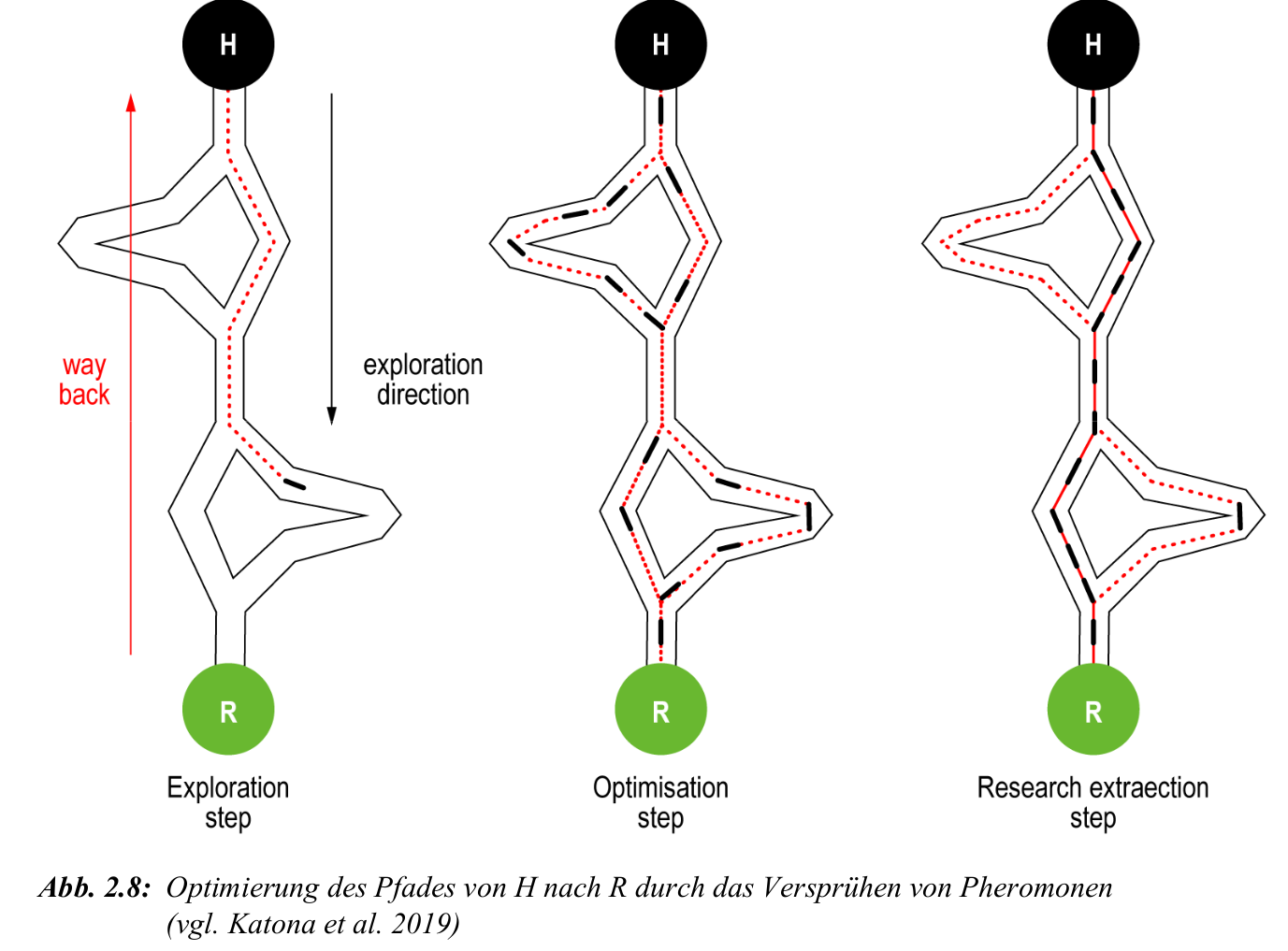
Ameisenalgorithmus (Ant Colony Optimization, ACO)
- Vorbild: reale Ameisen suchen effizient kürzeste Wege
- Kommunikation über Pheromonspuren – Stigmergie
- Bestandteile:
- künstliche Ameisen als Lösungskonstrukte
- Pheromon-Aktualisierung (Verstärkung & Verdunstung)
- optional: Daemon-Strategien zur Sicherung guter Lösungen
- geeignet für kombinatorische Optimierung (z. B. Routing-Probleme)
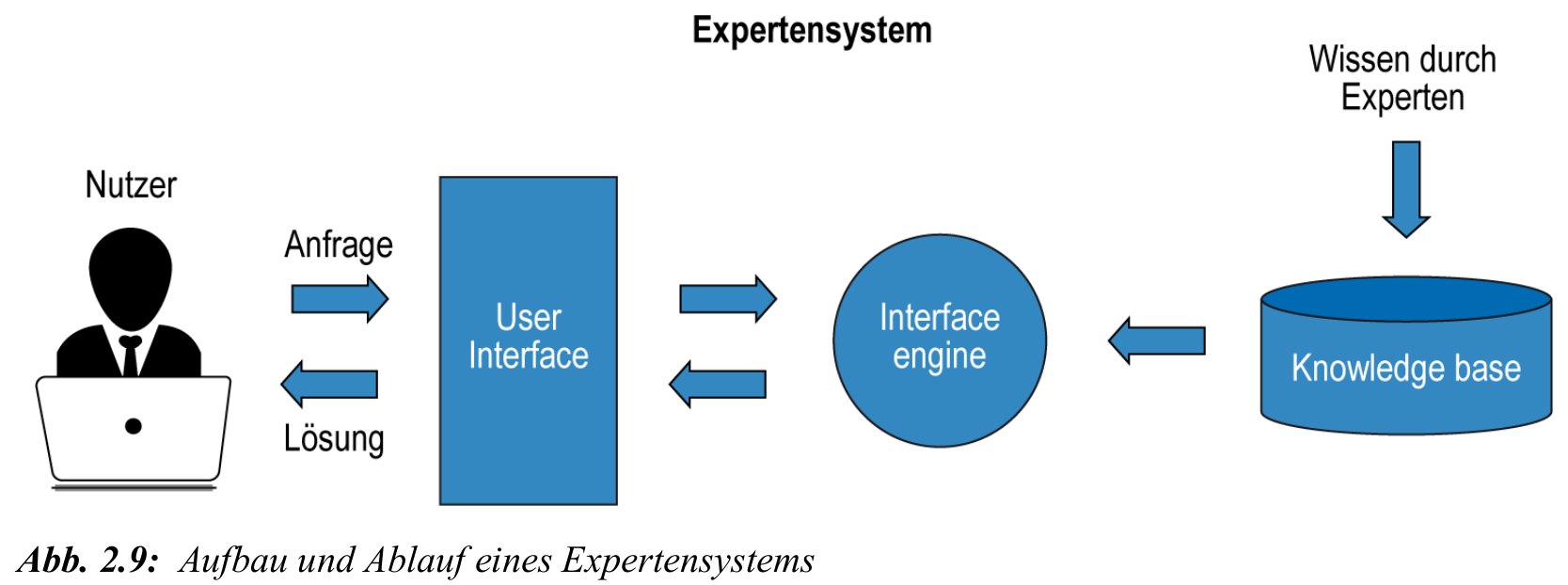
Expertensysteme (ES) und Multiagentensysteme (MAS)
Aufbau und Arbeitsweise
- wissensbasierte Systeme: simulieren Expertenwissen
- bestehen aus:
- Wissensbasis: Fakten, Regeln, Heuristiken
- Inferenzmaschine: Schlussfolgerung durch Verkettung
- Benutzeroberfläche: Eingabe/Interaktion
- Vorwärtsverkettung: datengetriebene Ableitung
- Rückwärtsverkettung: hypothesengeleitete Prüfung
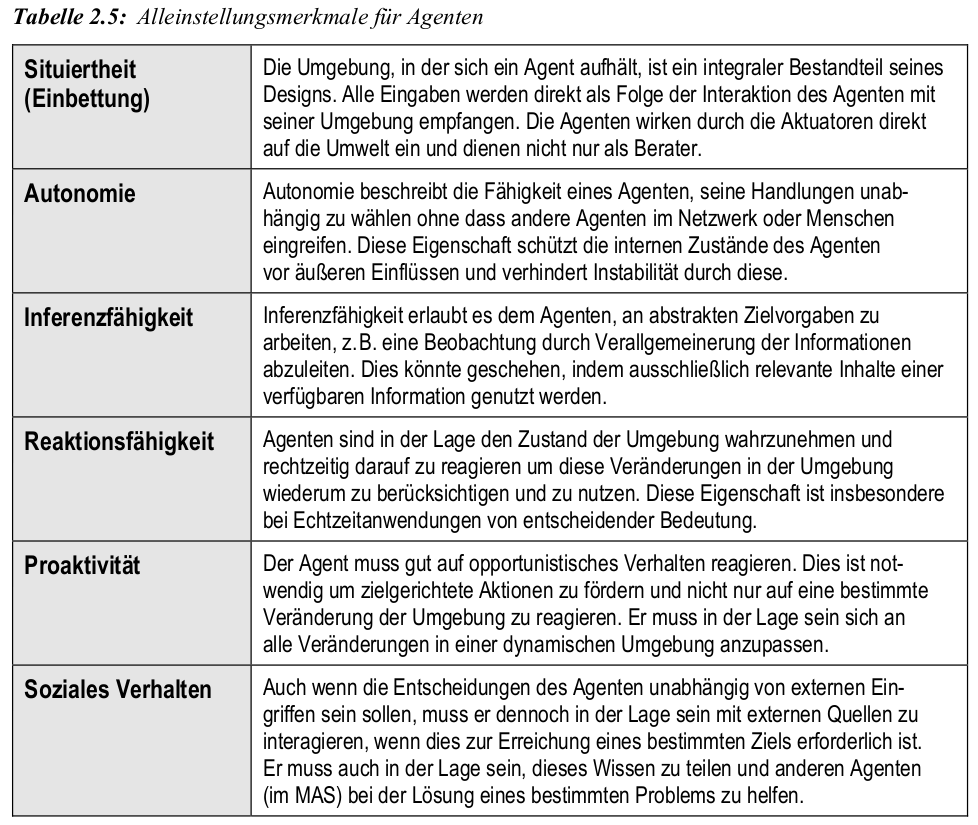
Eigenschaften und Herausforderungen
- Netzwerk autonomer Agenten zur Lösung komplexer Probleme
- zentrale Merkmale:
- Situiertheit, Autonomie, Inferenzfähigkeit, Reaktivität
- Proaktivität, soziales Verhalten
- Vorteile: Robustheit, Skalierbarkeit, Wiederverwendbarkeit
- Herausforderungen: Koordination, Abstraktion, Konfliktlösung